|
| | matrix_action (std::ostream &a_out, unsigned int a_ww, unsigned int a_wh) |
| |
| virtual | ~matrix_action () |
| |
| | matrix_action (const matrix_action &a_from) |
| |
| matrix_action & | operator= (const matrix_action &a_from) |
| |
| void | push_matrices () |
| |
| void | pop_matrices () |
| |
| mat4f & | projection_matrix () |
| |
| mat4f & | model_matrix () |
| |
| bool | end () const |
| |
| int | cur () const |
| |
| bool | project_point (float &a_x, float &a_y, float &a_z, float &a_w) |
| |
| void | model_point (float &a_x, float &a_y, float &a_z, float &a_w) |
| |
| void | projected_origin (float &a_x, float &a_y, float &a_z) |
| |
| | win_action (std::ostream &a_out, unsigned int a_ww, unsigned int a_wh) |
| |
| virtual | ~win_action () |
| |
| unsigned int | ww () const |
| |
| unsigned int | wh () const |
| |
| virtual void * | cast (const std::string &a_class) const |
| |
| virtual const std::string & | s_cls () const =0 |
| |
| | action (std::ostream &a_out) |
| |
| virtual | ~action () |
| |
| std::ostream & | out () const |
| |
| | states (unsigned int a_ww, unsigned int a_wh) |
| |
| virtual | ~states () |
| |
| const sg::state & | state () const |
| |
| sg::state & | state () |
| |
| void | pop_state () |
| |
| void | push_state () |
| |
| void | save_state (const sg::state &a_state) |
| |
| const sg::state & | saved_state () const |
| |
| sg::state & | saved_state () |
| |
Definition at line 15 of file matrix_action.
◆ matrix_action() [1/2]
| tools::sg::matrix_action::matrix_action |
( |
std::ostream & |
a_out, |
|
|
unsigned int |
a_ww, |
|
|
unsigned int |
a_wh |
|
) |
| |
|
inline |
◆ ~matrix_action()
| virtual tools::sg::matrix_action::~matrix_action |
( |
| ) |
|
|
inlinevirtual |
◆ matrix_action() [2/2]
| tools::sg::matrix_action::matrix_action |
( |
const matrix_action & |
a_from | ) |
|
|
inline |
Definition at line 31 of file matrix_action.
37 ,m_landscape(a_from.m_landscape)
◆ cur()
| int tools::sg::matrix_action::cur |
( |
| ) |
const |
|
inline |
◆ end()
| bool tools::sg::matrix_action::end |
( |
| ) |
const |
|
inline |
◆ model_matrix()
| mat4f& tools::sg::matrix_action::model_matrix |
( |
| ) |
|
|
inline |
◆ model_point()
| void tools::sg::matrix_action::model_point |
( |
float & |
a_x, |
|
|
float & |
a_y, |
|
|
float & |
a_z, |
|
|
float & |
a_w |
|
) |
| |
|
inline |
◆ operator=()
Definition at line 41 of file matrix_action.
42 parent::operator=(a_from);
47 m_landscape = a_from.m_landscape;
◆ pop_matrices()
| void tools::sg::matrix_action::pop_matrices |
( |
| ) |
|
|
inline |
◆ project_point()
| bool tools::sg::matrix_action::project_point |
( |
float & |
a_x, |
|
|
float & |
a_y, |
|
|
float & |
a_z, |
|
|
float & |
a_w |
|
) |
| |
|
inline |
Definition at line 78 of file matrix_action.
82 if(a_w==0.0F)
return false;
◆ projected_origin()
| void tools::sg::matrix_action::projected_origin |
( |
float & |
a_x, |
|
|
float & |
a_y, |
|
|
float & |
a_z |
|
) |
| |
|
inline |
◆ projection_matrix()
| mat4f& tools::sg::matrix_action::projection_matrix |
( |
| ) |
|
|
inline |
◆ push_matrices()
| void tools::sg::matrix_action::push_matrices |
( |
| ) |
|
|
inline |
◆ reset()
| void tools::sg::matrix_action::reset |
( |
| ) |
|
|
inlineprotected |
◆ m_cur
| int tools::sg::matrix_action::m_cur |
|
protected |
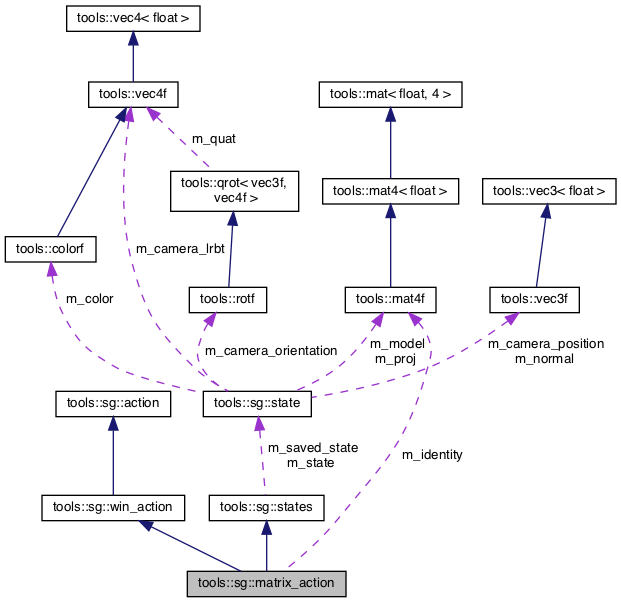
◆ m_identity
| mat4f tools::sg::matrix_action::m_identity |
|
protected |
◆ m_models
| std::vector<mat4f> tools::sg::matrix_action::m_models |
|
protected |
◆ m_projs
| std::vector<mat4f> tools::sg::matrix_action::m_projs |
|
protected |
The documentation for this class was generated from the following file:
- /Users/barrand/private/dev/softinex/g4tools/g4tools/tools/sg/matrix_action
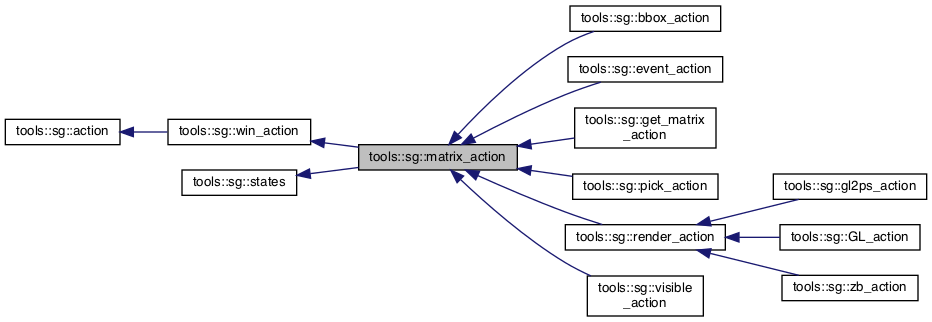
 Public Member Functions inherited from tools::sg::win_action
Public Member Functions inherited from tools::sg::win_action